1
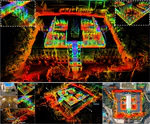
In this work, we present a novel global descriptor termed stable triangle descriptor (STD) for 3D place recognition. For a triangle, its shape is uniquely determined by the length of the sides or included angles. Moreover, the shape of triangles is completely invariant to rigid transformations. Based on this property, we first design an algorithm to efficiently extract local key points from the 3D point cloud and encode these key points into triangular descriptors. Then, place recognition is achieved by matching the side lengths (and some other information) of the descriptors between point clouds. The point correspondence obtained from the descriptor matching pair can be further used in geometric verification, which greatly improves the accuracy of place recognition. In our experiments, we extensively compare our proposed system against other state-of-the-art systems (i.e., M2DP, Scan Context) on public datasets (i.e., KITTI, NCLT, and Complex-Urban) and our self-collected dataset (with a non-repetitive scanning solid-state LiDAR). All the quantitative results show that STD has stronger adaptability and a great improvement in precision over its counterparts. To share our findings and make contributions to the community, we open source our code on our GitHub: https://github.com/hku-mars/STD.

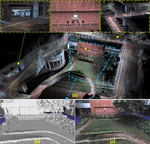
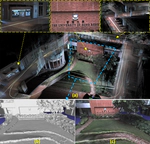
In this paper, we propose a novel LiDAR-Inertial-Visual sensor fusion framework termed R3LIVE, which takes advantage of measurement of LiDAR, inertial, and visual sensors to achieve robust and accurate state estimation. R$^3$LIVE consists of two subsystems, a LiDAR-Inertial odometry (LIO) and a Visual-Inertial odometry (VIO). The LIO subsystem (FAST-LIO) utilizes the measurements from LiDAR and inertial sensors and builds the geometric structure (i.e., the positions of 3D points) of the map. The VIO subsystem uses the data of Visual-Inertial sensors and renders the map’s texture (i.e., the color of 3D points). More specifically, the VIO subsystem fuses the visual data directly and effectively by minimizing the frame-to-map photometric error. The proposed system R3LIVE is developed based on our previous work R$^2$LIVE, with a completely different VIO architecture design. The overall system is able to reconstruct the precise, dense, 3D, RGB-colored maps of the surrounding environment in real-time (see our attached video https://youtu.be/j5fT8NE5fdg). Our experiments show that the resultant system achieves higher robustness and accuracy in state estimation than its current counterparts. To share our findings and make contributions to the community, we open source R$^3$LIVE on our Github: https://github.com/hku-mars/r3live.
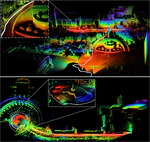
Loam-Livox is a robust, low drift, and real time odometry and mapping package for Livox LiDARs, significant low cost and high performance LiDARs that are designed for massive industrials uses. Our package address many key issues: feature extraction and selection in a very limited FOV, robust outliers rejection, moving objects filtering, and motion distortion compensation. In addition, we also integrate other features like parallelable pipeline, point cloud management using cells and maps, loop closure, utilities for maps saving and reload, etc. To know more about the details, please refer to our related paper:)
In this paper, we investigate the problem of enabling a drone to fly through a tilted narrow gap, without a traditional planning and control pipeline. To this end, we propose an end-to-end policy network, which imitates from the traditional pipeline and is fine-tuned using reinforcement learning. Unlike previous works which plan dynamical feasible trajectories using motion primitives and track the generated trajectory by a geometric controller, our proposed method is an end-to-end approach which takes the flight scenario as input and directly outputs thrust-attitude control commands for the quadrotor. Key contributions of our paper are: 1) presenting an imitate-reinforce training framework. 2) flying through a narrow gap using an end-to-end policy network, showing that learning based method can also address the highly dynamic control problem as the traditional pipeline does (see attached video https://www.youtube.com/watch?v=-HXARYlhat4 ). 3) propose a robust imitation of an optimal trajectory generator using multilayer perceptrons. 4) show how reinforcement learning can improve the performance of imitation learning, and the potential to achieve higher performance over the model-based method.
