LiDAR SLAM
Invited by shenlanxueyuan.com, I give an online talk on “Simultaneous Localization and Mapping with Multi-sensor Fusion (基于多传感器融合的定位和建图系统)”. In this talk, I shared my researches in my Ph.D. studies.
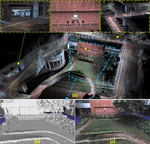
In this paper, we propose a novel LiDAR(-inertial) odometry and mapping framework to achieve the goal of simultaneous localization and meshing in real-time. This proposed framework termed ImMesh comprises four tightly-coupled modules: receiver, localization, meshing, and broadcaster. The localization module utilizes the prepossessed sensor data from the receiver, estimates the sensor pose online by registering LiDAR scans to maps, and dynamically grows the map. Then, our meshing module takes the registered LiDAR scan for incrementally reconstructing the triangle mesh on the fly. Finally, the real-time odometry, map, and mesh are published via our broadcaster. The key contribution of this work is the meshing module, which represents a scene by an efficient hierarchical voxels structure, performs fast finding of voxels observed by new scans, and reconstructs triangle facets in each voxel in an incremental manner. This voxel-wise meshing operation is delicately designed for the purpose of efficiency; it first performs a dimension reduction by projecting 3D points to a 2D local plane contained in the voxel, and then executes the meshing operation with pull, commit and push steps for incremental reconstruction of triangle facets. To the best of our knowledge, this is the first work in literature that can reconstruct online the triangle mesh of large-scale scenes, just relying on a standard CPU without GPU acceleration. To share our findings and make contributions to the community, we make our code publicly available on our GitHub: https://github.com/hku-mars/ImMesh
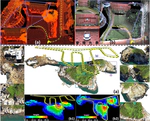
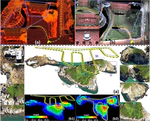
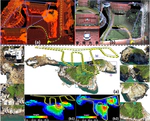
In this work, we present a novel global descriptor termed stable triangle descriptor (STD) for 3D place recognition. For a triangle, its shape is uniquely determined by the length of the sides or included angles. Moreover, the shape of triangles is completely invariant to rigid transformations. Based on this property, we first design an algorithm to efficiently extract local key points from the 3D point cloud and encode these key points into triangular descriptors. Then, place recognition is achieved by matching the side lengths (and some other information) of the descriptors between point clouds. The point correspondence obtained from the descriptor matching pair can be further used in geometric verification, which greatly improves the accuracy of place recognition. In our experiments, we extensively compare our proposed system against other state-of-the-art systems (i.e., M2DP, Scan Context) on public datasets (i.e., KITTI, NCLT, and Complex-Urban) and our self-collected dataset (with a non-repetitive scanning solid-state LiDAR). All the quantitative results show that STD has stronger adaptability and a great improvement in precision over its counterparts. To share our findings and make contributions to the community, we open source our code on our GitHub: https://github.com/hku-mars/STD.

This work proposed a LiDAR-inertial-visual fusion framework termed R$^3$LIVE++ to achieve robust and accurate state estimation while simultaneously reconstructing the radiance map on the fly. R$^3$LIVE++ consists of a LiDAR-inertial odometry (LIO) and a visual-inertial odometry (VIO), both running in real-time. The LIO subsystem utilizes the measurements from a LiDAR for reconstructing the geometric structure, while the VIO subsystem simultaneously recovers the radiance information of the geometric structure from the input images. R$^3$LIVE++ is developed based on R$^3$LIVE and further improves the accuracy in localization and mapping by accounting for the camera photometric calibration and the online estimation of camera exposure time. We conduct more extensive experiments on public and private datasets to compare our proposed system against other state-of-the-art SLAM systems. Quantitative and qualitative results show that R$^3$LIVE++ has significant improvements over others in both accuracy and robustness. Moreover, to demonstrate the extendability of R$^3$LIVE++, we developed several applications based on our reconstructed maps, such as high dynamic range (HDR) imaging, virtual environment exploration, and 3D video gaming. Lastly, to share our findings and make contributions to the community, we release our codes, hardware design, and dataset on our Github: https://github.com/hku-mars/r3live
In this paper, we propose a novel LiDAR-Inertial-Visual sensor fusion framework termed R3LIVE, which takes advantage of measurement of LiDAR, inertial, and visual sensors to achieve robust and accurate state estimation. R$^3$LIVE consists of two subsystems, a LiDAR-Inertial odometry (LIO) and a Visual-Inertial odometry (VIO). The LIO subsystem (FAST-LIO) utilizes the measurements from LiDAR and inertial sensors and builds the geometric structure (i.e., the positions of 3D points) of the map. The VIO subsystem uses the data of Visual-Inertial sensors and renders the map’s texture (i.e., the color of 3D points). More specifically, the VIO subsystem fuses the visual data directly and effectively by minimizing the frame-to-map photometric error. The proposed system R3LIVE is developed based on our previous work R$^2$LIVE, with a completely different VIO architecture design. The overall system is able to reconstruct the precise, dense, 3D, RGB-colored maps of the surrounding environment in real-time (see our attached video https://youtu.be/j5fT8NE5fdg). Our experiments show that the resultant system achieves higher robustness and accuracy in state estimation than its current counterparts. To share our findings and make contributions to the community, we open source R$^3$LIVE on our Github: https://github.com/hku-mars/r3live.