LiDER-Inertial-Visual
Invited by shenlanxueyuan.com, I give an online talk on “Simultaneous Localization and Mapping with Multi-sensor Fusion (基于多传感器融合的定位和建图系统)”. In this talk, I shared my researches in my Ph.D. studies.
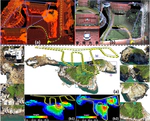
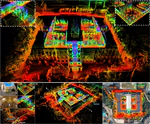
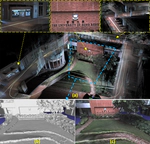
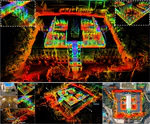
This work proposed a LiDAR-inertial-visual fusion framework termed R$^3$LIVE++ to achieve robust and accurate state estimation while simultaneously reconstructing the radiance map on the fly. R$^3$LIVE++ consists of a LiDAR-inertial odometry (LIO) and a visual-inertial odometry (VIO), both running in real-time. The LIO subsystem utilizes the measurements from a LiDAR for reconstructing the geometric structure, while the VIO subsystem simultaneously recovers the radiance information of the geometric structure from the input images. R$^3$LIVE++ is developed based on R$^3$LIVE and further improves the accuracy in localization and mapping by accounting for the camera photometric calibration and the online estimation of camera exposure time. We conduct more extensive experiments on public and private datasets to compare our proposed system against other state-of-the-art SLAM systems. Quantitative and qualitative results show that R$^3$LIVE++ has significant improvements over others in both accuracy and robustness. Moreover, to demonstrate the extendability of R$^3$LIVE++, we developed several applications based on our reconstructed maps, such as high dynamic range (HDR) imaging, virtual environment exploration, and 3D video gaming. Lastly, to share our findings and make contributions to the community, we release our codes, hardware design, and dataset on our Github: https://github.com/hku-mars/r3live
In this paper, we propose a novel LiDAR-Inertial-Visual sensor fusion framework termed R3LIVE, which takes advantage of measurement of LiDAR, inertial, and visual sensors to achieve robust and accurate state estimation. R$^3$LIVE consists of two subsystems, a LiDAR-Inertial odometry (LIO) and a Visual-Inertial odometry (VIO). The LIO subsystem (FAST-LIO) utilizes the measurements from LiDAR and inertial sensors and builds the geometric structure (i.e., the positions of 3D points) of the map. The VIO subsystem uses the data of Visual-Inertial sensors and renders the map’s texture (i.e., the color of 3D points). More specifically, the VIO subsystem fuses the visual data directly and effectively by minimizing the frame-to-map photometric error. The proposed system R3LIVE is developed based on our previous work R$^2$LIVE, with a completely different VIO architecture design. The overall system is able to reconstruct the precise, dense, 3D, RGB-colored maps of the surrounding environment in real-time (see our attached video https://youtu.be/j5fT8NE5fdg). Our experiments show that the resultant system achieves higher robustness and accuracy in state estimation than its current counterparts. To share our findings and make contributions to the community, we open source R$^3$LIVE on our Github: https://github.com/hku-mars/r3live.
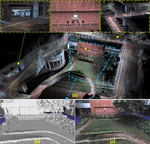
In this letter, we propose a robust, real-time tightly-coupled multi-sensor fusion framework, which fuses measurements from LiDAR, inertial sensor, and visual camera to achieve robust and accurate state estimation. Our proposed framework is composed of two parts: the filter-based odometry and factor graph optimization. To guarantee real-time performance, we estimate the state within the framework of error-state iterated Kalman-filter, and further improve the overall precision with our factor graph optimization. Taking advantage of measurements from all individual sensors, our algorithm is robust enough to various visual failure, LiDAR-degenerated scenarios, and is able to run in real time on an on-board computation platform, as shown by extensive experiments conducted in indoor, outdoor, and mixed environments of different scale (see attached video https://youtu.be/9lqRHmlN_MA). Moreover, the results show that our proposed framework can improve the accuracy of state-of-the-art LiDAR-inertial or visual-inertial odometry. To share our findings and to make contributions to the community, we open source our codes on our Github: https://github.com/hku-mars/r2live.