R2LIVE
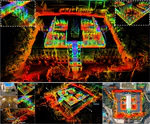
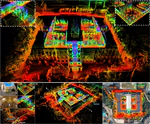
In this letter, we propose a robust, real-time tightly-coupled multi-sensor fusion framework, which fuses measurements from LiDAR, inertial sensor, and visual camera to achieve robust and accurate state estimation. Our proposed framework is composed of two parts: the filter-based odometry and factor graph optimization. To guarantee real-time performance, we estimate the state within the framework of error-state iterated Kalman-filter, and further improve the overall precision with our factor graph optimization. Taking advantage of measurements from all individual sensors, our algorithm is robust enough to various visual failure, LiDAR-degenerated scenarios, and is able to run in real time on an on-board computation platform, as shown by extensive experiments conducted in indoor, outdoor, and mixed environments of different scale (see attached video https://youtu.be/9lqRHmlN_MA). Moreover, the results show that our proposed framework can improve the accuracy of state-of-the-art LiDAR-inertial or visual-inertial odometry. To share our findings and to make contributions to the community, we open source our codes on our Github: https://github.com/hku-mars/r2live.