 Image credit: Unsplash
Image credit: Unsplash
Date
Jan 16, 2023 8:00 PM — 11:00 PM
Location
Online talk
PPT Slide:
Simultaneous_Localization_and_Mapping_with_Multi-sensor_Fusion.pdf
Talks:
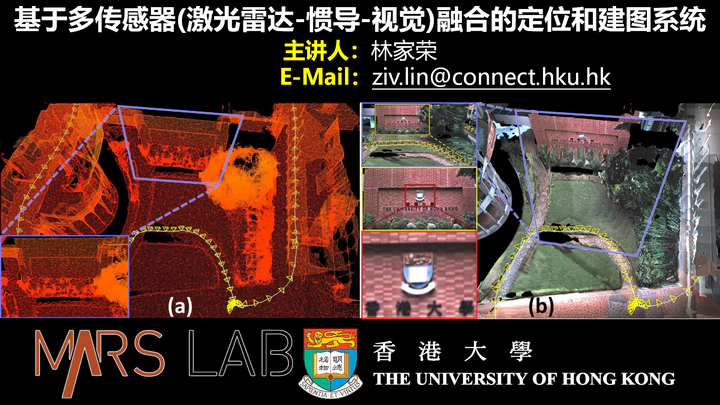
[Online] Simultaneous Localization and Mapping with Multi-sensor Fusion (基于多传感器融合的定位和建图系统)
Contents
- LiDAR(-inertial) SLAM
- World’s first LiDAR odometry and mapping (LOAM) system for solid-state LiDAR (loam-livox)
- Tightly-coupled LiDAR-inertial odometry (FAST-LIO)
- Multi-sensor Fusion (LiDAR-Inertial-Visual)
- Immediate LiDAR localization and meshing Framework (ImMesh)
- Introduction to ImMesh, experiments and results.
- Applications based on ImMesh
- ImMesh for LiDAR point cloud reinforcement
- ImMesh for Rapid, Lossless texture reconstruction
Jiarong Lin
Ph.D. candidate in Robotics🤖
My research interests include Simultaneous localization and mapping (SLAM), Multi-sensor (i.e., LiDAR-Inertial-Visual) Fusion, and 3D reconstruction. My popular works include: R3LIVE, FAST-LIO, loam-livox, R2LIVE, and ImMesh🆕.